6세대(6G) 기반 자율주행 환경에 적합한 알고리즘을 구현한 통합 시뮬레이터가 개발됐다.
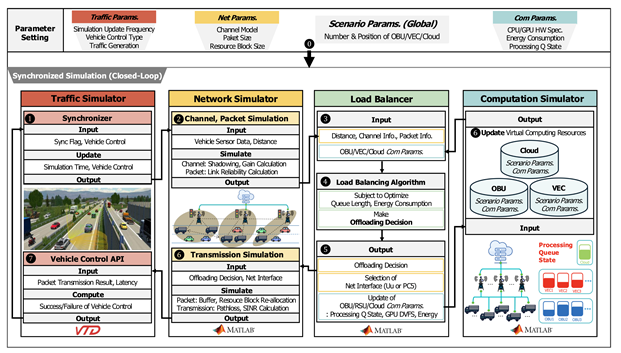
대구경북과학기술원(DGIST) 전기전자컴퓨터공학과 최지웅, 좌훈승, 김백규 교수팀은 고려대학교 곽정호 교수팀 등과 함께 자율주행차의 연산·통신 자원이 한꺼번에 몰리지 않도록 적절히 분산처리할 수 있는 '통합 네트워크-컴퓨팅 부하분산(INCL Balancing) 시뮬레이터'를 세계 최초로 구현했다고 11일 밝혔다. 이를 통해 차량 내부장치를 실시간 정확하게 제어하는 것은 물론 에너지 효율까지 끌어올릴 수 있다는 것이 연구팀의 설명이다.
연구팀은 "이 시뮬레이터는 실제 도로 기반 자율주행 시뮬레이터(VTD)와 네트워크·컴퓨팅 시뮬레이터(MATLAB 기반)를 통합한 것"이라며 "차량간 통신품질, 연산처리 능력, 에너지 소비량을 실시간 분석할 수 있다"고 강조했다. 특히 지연시간, 에너지, 안전성을 동시에 고려한 제어가 가능하다는 것이다.
플래투닝, 교차로 주행, 사고 대응 등 8가지 시나리오와 인천 청라지구 실측 데이터를 활용한 시뮬레이션 결과, 에너지 절감효과가 평균 21.7%에 달하는 것으로 나왔다. 이는 기존 알고리즘 대비 73.3% 향상된 처리율이다. 또 패킷 전달 성공률(PDR)과 처리지연, 에너지 사용량 등을 고려한 최적화 수학모델을 반영함으로써 자율주행차의 실시간 제어 성능과 안전성을 동시에 끌어올렸다고 연구팀은 설명했다.
DGIST 최지웅 교수는 "지연 시간, 에너지, 안전성을 모두 고려해 실시간 변동 상황을 정밀 분석할 수 있는 시뮬레이터를 구현했다"며 "고속도로 군집주행, 스마트시티 교차로 제어 등 다양한 6G 응용 서비스에 활용 가능하며, 자율주행 사업자와 차량 클라우드 플랫폼, 통신사, 디지털트윈 서비스 등에도 확장할 수 있다"고 밝혔다.
이번 연구결과는 통신분야 국제학술지 IEEE Communications Magazine 지난달 29일자에 게재됐다.
Copyright @ NEWSTREE All rights reserved.